SCRAM-Bots
Soft Curved Reconfigurable Anisotropic Mechanisms
This is a groundbreaking research on building new soft robots and mechanisms via the incorporation of curves, buckling and instability into continuum soft materials and structures to enable virtual joint formation with embedded sensing, actuation and control.
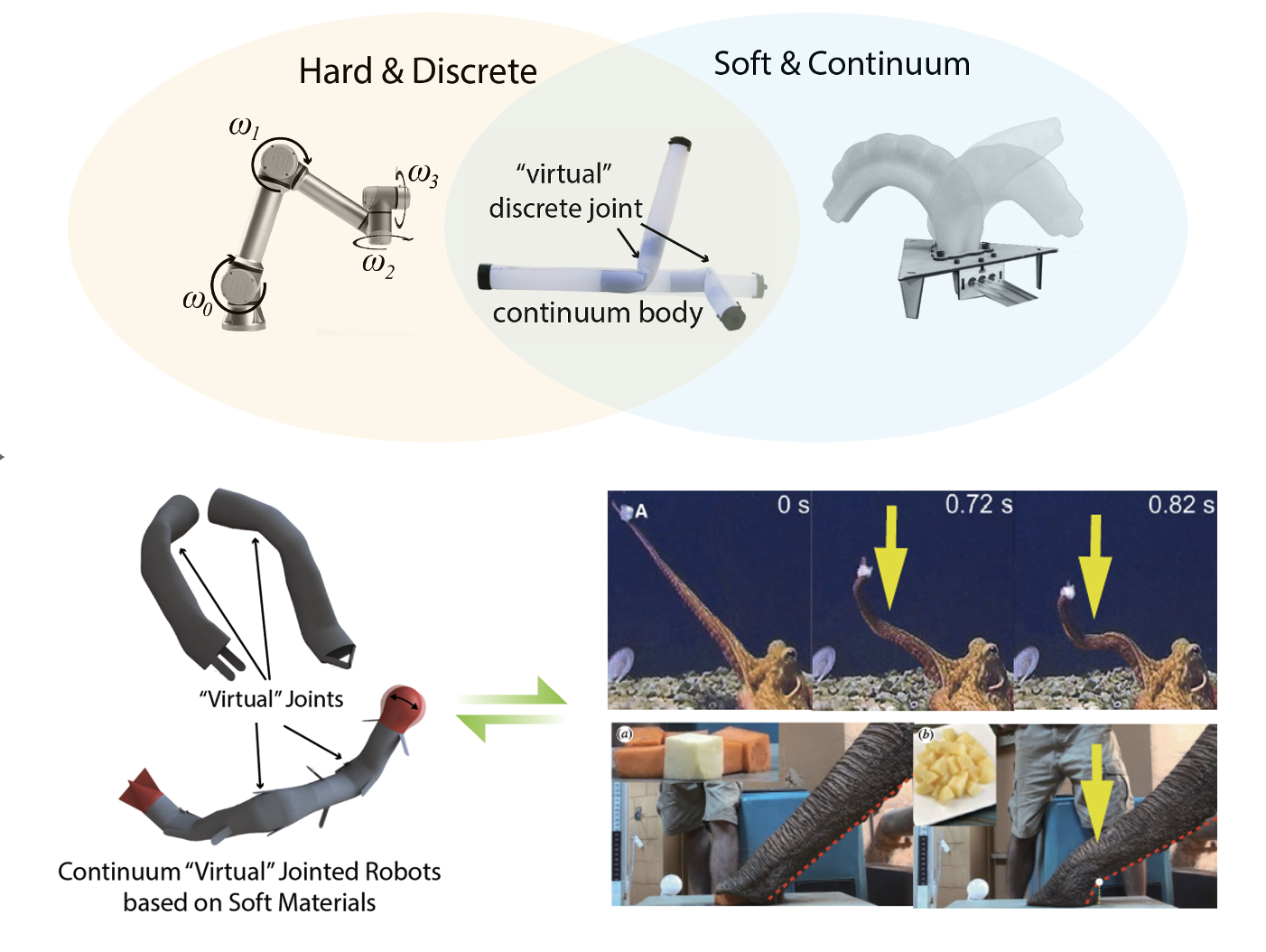
Concept of future reconfigurable robots with flexible joint-linkage configurations based on hybrid robot paradigms (rigid and soft)
Internal joint modules for the reconfigurable soft linkage robot
Reconfigurable soft linkage robot in deployment
Reconfigurable robot locomotion (gaits)
Robot turning
Publications
1. M. Jiang, J. Wang, and N. Gravish, A reconfigurable soft linkage robot via internal “virtual” joints. 2024 (Under review)2. M. Jiang, Q. Yu, and N. Gravish, “Vacuum induced tube pinching enables reconfigurable flexure joints with controllable bend axis and stiffness,” in 2021 IEEE 4th International Conference on Soft Robotics (RoboSoft), Apr. 2021, pp. 315–320. [pdf]